
随着人工智能、大数据、物联网等前沿技术与传统船舶的深度融合,船舶技术由自动化向自主化方向“进化”,船舶自主化技术的应用将引发船舶行业的技术革命,为船舶技术的发展带来新的机遇与挑战。同时,船舶自主化技术是一门新兴技术,产品规范、技术标准、法律法规等方面尚未成熟,而自动化技术在船舶领域已经有了几十年的应用经验,技术及配套体系相对完善,船舶自主化技术在发展过程中即借鉴了船舶自动化技术的应用经验,又呈现出独特的技术发展路径,两种技术即深度融合又全面颠覆。因此,理解船舶自主化技术与自动化技术的区别,成为制定船舶自主化技术发展路径的关键。
国际海事组织(IMO)在海安会(MSC)第99次会议上分别对船舶自主化和自动化系统进行了定义:
船舶自主化系统即系统使用人工智能或计算机程序独立于人员的监督和控制对船舶功能进行管理和控制。
船舶自动化系统即在人员的监管下,系统提供决策支持和/或执行船舶功能。
在船舶自主化系统定义中,人工智能是实现系统自主化的核心技术,这一定义与我国船舶智能化的定义基本相同,或者可以理解为船舶智能化是自主化的应用形式之一。从IMO对船舶自主化和自动化系统的定义来看,自主化与自动化系统最大区别在于是否需要人员在控制环路中发挥作用。为了更好的理解自主化与自动化的区别,需要从这两种技术的工作原理进行分析,自动化和自主化系统的工作原理如图1所示:
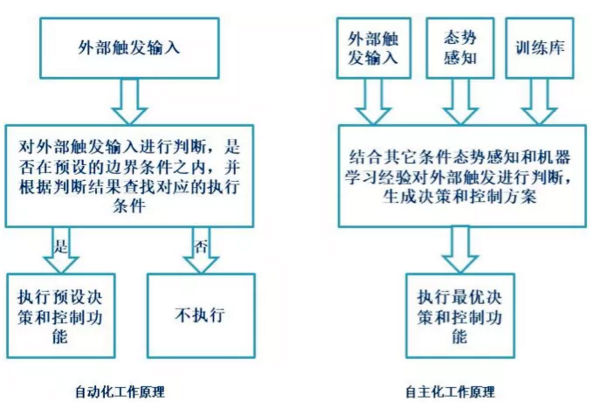
图1 自动化和自主化的工作原理
自动化系统工作原理的核心是外部触发输入必须处于预设的边界条件之内,才能进行判断,从而执行相应的功能指令。在相同的边界条件下,功能指令的执行相同。从本质来看,自动化系统主要依靠人类经验,并转化为边界条件在系统中进行预设。因此,自动化功能的实现受限于人类特殊经验、预设边界条件数量和运算执行速度等因素。当系统功能较为复杂时,使用自动化技术无法覆盖所有工作场景,需要人员在其控制环路进行监控,避免未知风险的发生。自主化系统一般不进行边界条件的预设,主要使用人工智能技术,依靠机器学习的经验,结合外部触发输入及其他条件的态势感知进行机器判断,生成相应的执行指令,执行指令具有不可预测的特点。自主化功能的实现主要受限于算法质量、运算速度和训练库范围等因素。由于人工智能算法发展缓慢,现阶段系统实现完全自主化还比较困难。从自动化和自主化的工作原理来看,两者功能实现有着本质的不同,随着核心处理器技术的高速发展,芯片的处理速度和运算能力显著提高,应用自动化技术可以预设的边界条件不断增多,覆盖场景不断扩大,自动化系统在人员在环的情况下,是可以实现一些简单的自主化功能,如辅助决策系统等。但是在复杂自主化系统领域,自动化技术无法实现完全自主功能,如与航行安全、环保及保障相关的自主化系统。
现阶段,自动化还是船舶控制系统的主流应用技术。在降低船员劳动强度、减少船舶配员、提高船舶运营安全等需求的驱动下,船舶技术开始由自动化向自主化进行过渡。船舶自主化技术的应用核心是使用机器等效替代人员对船舶功能进行控制。因此,要从理解人类控制行为的角度来探讨船舶自主化技术的发展思路。人类对于特定事件的处理流程如图2所示:
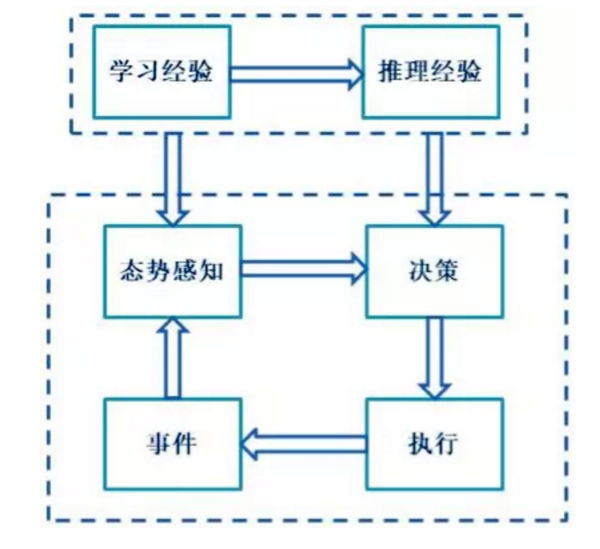
图2 人类对于特定事件的处理流程
态势感知:通过学习经验及推理经验进行信息收集、筛选、多信源融合的过程
决策:通过学习经验及推理经验对态势感知信息进行判断并生成决策方案的过程。
执行:根据决策方案执行特定行为的过程。
船舶自主化系统与人类对于特定事件处理流程类似,分为态势感知、决策和执行三个过程,分别位于自主化系统架构的信息层、决策层和控制层,信息层负责采集、融合有效信息为决策层提供信息输入,决策层根据信息的输入生成执行方案,控制层根据执行方案控制船舶系统。其中自主化系统的信息层和决策层主要使用自主化技术进行实现,控制层一般采用自动化技术即可实现。船舶自主化系统架构如图3所示:

图3 船舶自主化系统架构
船舶自主化系统的信息层以机器人视觉技术为核心,通过感知传感器采集场景工况、设备状态、操控指令等信息并进行融合。近年来,感知传感器技术发展迅速,在一些船舶系统中已经得到了工程化应用,如航行避碰辅助决策、机舱运维、动力定位等系统。使用感知传感器,如摄像头、激光雷达、振动传感器、流量传感器等进行态势感知,使用机器感知传感器在信息采集的覆盖范围和探测距离上比人类感官更具优势,可以获取更多类型的有效信息,为决策层提供更有参考价值的数据。部分感知传感器功能的实现是基于机器学习技术,如摄像头及激光雷达实现目标识别和船舶行为判断等功能,感知传感器的功能实现与人类进行目标识别和行为判断的过程类似,通过对目标和行为的典型类型进行记录、联想和推理,生成目标和行为识别的一定“经验”,从而达到识别目标和行为的目的。与人类获取经验的方式不同,机器学习算法需要通过大量的目标和行为数据对其进行训练从而产生“经验”,由于机器学习算法联想和推理的能力较差。因此除了机器学习算法的性能,用于训练的数据库覆盖范围成为影响目标和行为识别准确率的主要因素之一。船舶自主化系统的决策层相当于人类的大脑,主要使用模糊推理、神经网络和贝叶斯网络等推理算法预测工作场景的态势,根据“训练经验”制定执行策略,决策层的经验获取也是依靠机器学习技术来实现,如自主航行系统,需要大量的实际航行场景对其进行训练,使其在训练过程中达到类似于人类驾驶船舶的能力,与人类驾驶员类似,训练场景交通流量、船舶类型、天气海况等因素的不同会导致“驾驶员”驾驶能力的不同,并且机器“驾驶员”会受限于决策算法性能、处理器速度、感知融合数据等因素的影响。因此需要大量不同类型的训练场景进行反复训练,才能在某些情况下实现部分自主化的功能。
综上所述,机器学习智能化算法是现阶段船舶自主化系统实现目标识别、行为判断和自主决策的核心技术,由于现有算法的推理和预测能力不足,虽然自主化技术在工作场景适用性方面比自动化技术更为广泛,但是也会遇到类似自动化技术边界条件有限的技术瓶颈,即训练库数据不足,获得经验有限。因此在考虑提高机器学习算法性能的同时,应结合现阶段算法的实际情况,结合建设成本,集中解决目标、行为、场景训练库采集范围不足以覆盖所有工况的问题。
近年来,我国智能船舶系统从辅助决策系统向部分自主系统进行过渡,即由自动化向自主化发生质变。随着处理器技术和相关算法的融合发展,船舶技术自主化的发展成为了现实,部分自主化系统已进入试验阶段,确保船舶自主化技术应用的安全、环保和保障已经成为航运界关注的焦点,国际海事组织在海安会第100次会议上批准了《海上自主水面船舶试验暂行指南》,在促进船舶自主化技术的发展的同时,防范船舶自主化技术应用带来的未知风险。在船舶技术从自动化向自主化的发展过程,不仅要思考船舶自主化技术实现的技术路径,对船舶自主化技术应用进行安全管控也将成为一个重要的研究方向。


